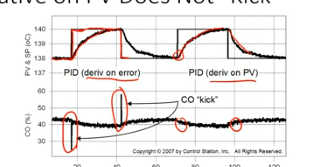
The derivative kick refers to the spike in the controller error when the setpoint is changed. The derivative of a step function is an impulse function. A sudden jump to a different setpoint may cause the error of the derivative to instantly become very large, this could cause the controller to saturate. One way to get around this is to substitute the error with the derivative of the process value and add a time constant term. The resulting equation for the derivative controller component is
Where tau is the derivative time constant, and PV is the process variable.
ProportionalIntegralDerivative
#philslabPIDControllerImplementation2020